Transparency Policy
We believe that simple marketing claims about the superiority of our GNSS spoofing detection system are insufficient for an industry tasked with safeguarding critical national infrastructure. Therefore, our reports are always comprehensive, focused on engineering specifics, and grounded in concrete data and precise metrics. This report, in particular, highlights our system’s performance in terms of spoofing detection speed and classification accuracy. We take pride in being fully transparent, openly sharing detailed results without hesitation, so that you can confidently evaluate the facts and draw your own conclusions.
Summary of Key Findings
- 100% Interference Detection Rate: Complete detection of all spoofing and jamming scenarios, demonstrating unmatched reliability in protecting critical infrastructure.
- Rapid Detection Latency: Median response time of 0 seconds, with an average latency of 0.6 seconds, ensuring immediate identification of interference.
- 98.3% Classification Accuracy: Accurate distinction between spoofing and jamming types in 59 of 60 tests, affirming high precision in complex scenarios.
- Efficient GNSS Signal Recovery: Consistent re-acquisition of GNSS signals within 1.5 minutes, with expected recovery under 45 seconds in optimal conditions.
Introduction
About the Event
JammerTest 2024, held from September 9th to 13th in Andøya, Norway, is an annual event recognized as one of the largest open testing platforms for PNT/GNSS resilience in the world. Participants from both the public and private sectors are exposed to a wide range of spoofing and jamming attacks, from simple to highly sophisticated, aimed at assessing the robustness of PNT systems against both unintentional and intentional interference. The remote Arctic location was strategically chosen to minimize disruptions to civil society while facilitating high-power signal transmissions in a controlled environment.
Device Under Test
For this test, we evaluated the performance of the following components:
- GP-Probe TGE2-CH3 4G RFSA
- Hardware Revision: 1.3
- Firmware Version: 1.9.2
- GP-Cloud with the following settings:
- Calibration during the 24 hours before starting the tests.
- Detection algorithm optimization: Latency Optimization mode.
Test Location and Equipment Setup
The testing was conducted at Test Area 1 (The Bleik Comuniticy Center Building), the main test area for JammerTest 2024. The GP-Probe was installed inside the building, with the antennas mounted on a windowsill. The antennas used: magnetic with embedded preamp.



Supporting Documentation
Below are the key documents related to JammerTest 2024, each providing essential details for understanding the test procedures, scenarios, and transmission plans. You can download them directly for further insights:
Briefing – JammerTest 2024
This document offers an overview of the event, including safety protocols, test locations, and schedules. It provides essential information for participants and outlines the organizational structure of the event.
Transmission Plan – JammerTest 2024
This document details the transmission schedule, outlining when and where different types of jamming and spoofing signals were deployed. It includes power levels, signal types, and timings for each test scenario.
Test Catalogue – JammerTest 2024
The Test Catalogue provides a comprehensive list of all test scenarios, including low-power and high-power jamming, spoofing, and drone testing. It outlines the specific setups for each test environment and configuration.
Test Methodology
This section outlines how the test results will be interpreted and reported in this document. Each interference scenario will be analyzed based on the data collected during JammerTest 2024. The interference scenarios are defined in the Transmission Plan – JammerTest 2024, which serves as the primary reference for all tests.
For each test, the following approach will be applied to assess the system’s detection and classification performance:
- Interference definition according to the Transmission Plan:
Each test will be linked to a specific interference scenario as described in the Transmission Plan. The type of interference (jamming or spoofing), signal characteristics, and transmission schedule will be used to contextualize the test results. - GP-Cloud Data Presentation:
For each interference event, two key screenshots from the GP-Cloud system will be included in the report:- Full Event Screenshot: Displays the complete timeline of the interference event, including the duration and overall signal behavior. This view will provide a general overview of the interference impact and classification accuracy.
- Event Front Screenshot: A close-up of the interference signal’s leading edge to precisely measure detection latency. This allows for an accurate determination of how quickly the system responded after the signal was introduced.
- Detection Time Measurement:
Detection time will be determined by comparing the Spectrum Waterfall (which shows the start of the RF signal) with the Anomaly, Jamming, or Spoofing graphs. The detection time is defined as the difference (in seconds) between the appearance of the signal on the Spectrum Waterfall and the point where the relevant graph crosses the decision threshold. - Classification Accuracy Evaluation:
The accuracy of the interference classification will be evaluated using the Jamming and Spoofing charts. A correct classification is registered if:- For jamming: The Jamming chart shows the probability exceeding the threshold during the interference event.
- For spoofing: The Spoofing chart shows the spoofing probability exceeding the threshold during the event. Since the detection algorithms for spoofing and jamming signatures operate independently, it is possible to see high values on both the Jamming and Spoofing charts simultaneously during a spoofing incident. However, spoofing takes higher priority in the final classification of the event.
- Key Performance Metrics:
The following metrics will be assessed for each interference scenario:- Detection Success: Whether the system successfully detected the interference. A “Yes” is recorded if the Anomaly, Jamming, or Spoofing graph exceeds the detection threshold during the event.
- Detection Latency: The time difference (in seconds) between the RF signal’s appearance on the Spectrum Waterfall and the moment the decision threshold is crossed on the detection graph.
- Classification Accuracy: Whether the system accurately classified the interference type. A “Yes” is recorded if:
- For spoofing: The Spoofing graph shows the spoofing probability exceeding the threshold.
- For jamming: The Jamming graph shows the jamming probability exceeding the threshold.
Example of Data Interpretation
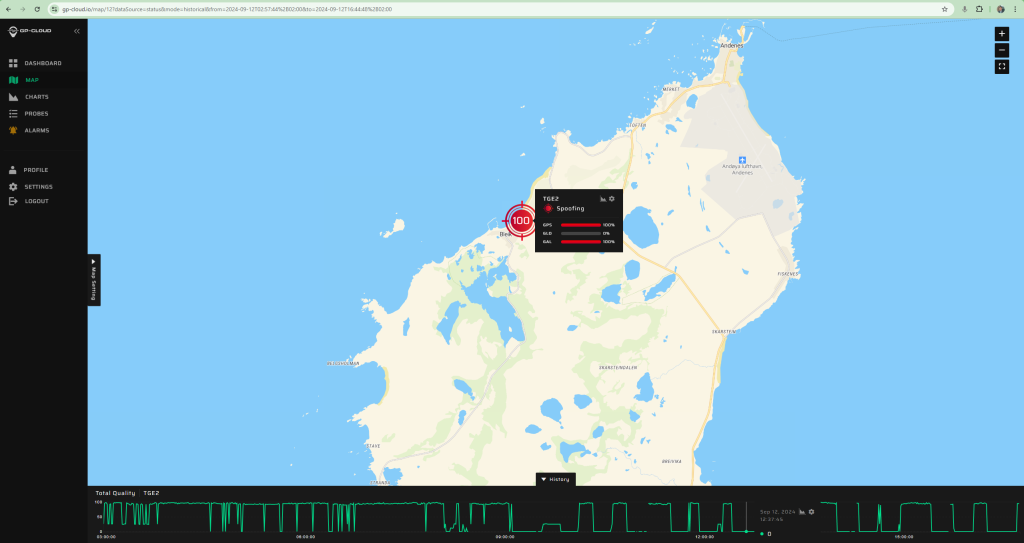
In this section, we demonstrate the data interpretation methodology using two screenshots that capture a single interference incident. The first screenshot provides a comprehensive view of the entire event, while the second focuses on the front of the interference signal, allowing for a precise measurement of detection latency.
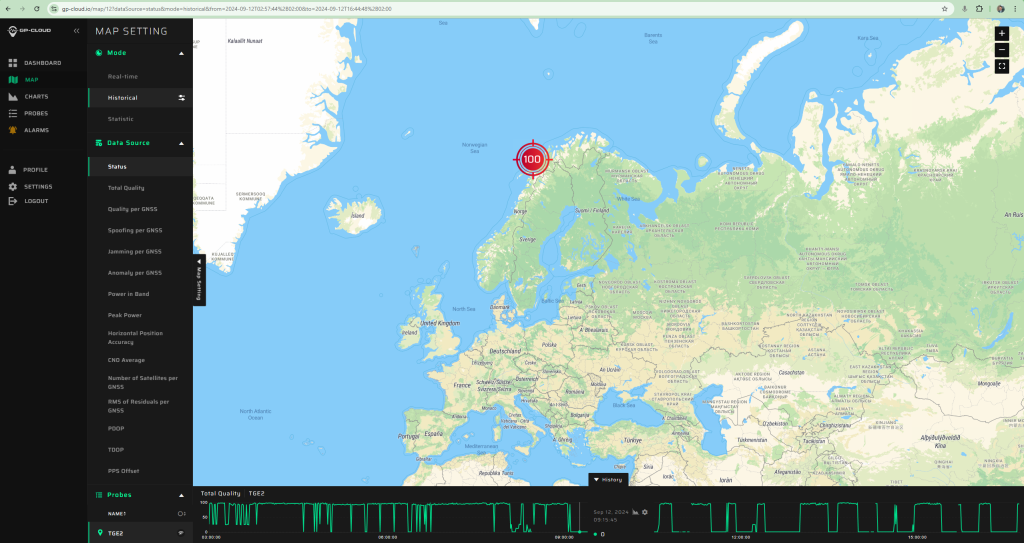
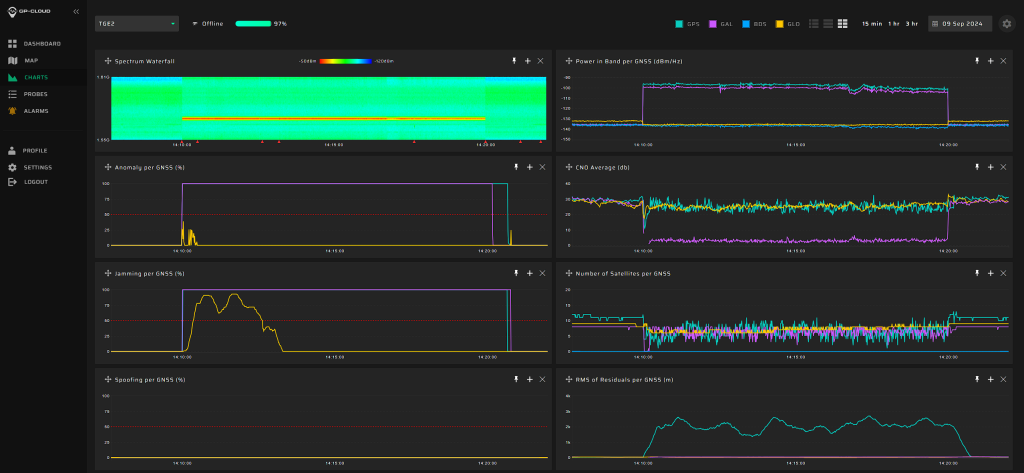
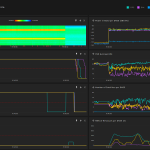
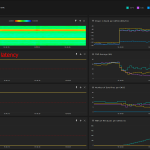
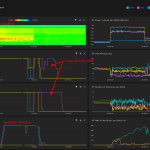
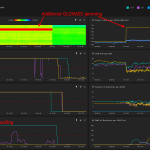
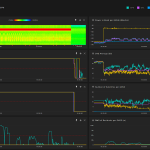
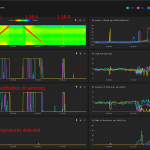
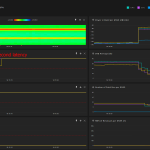
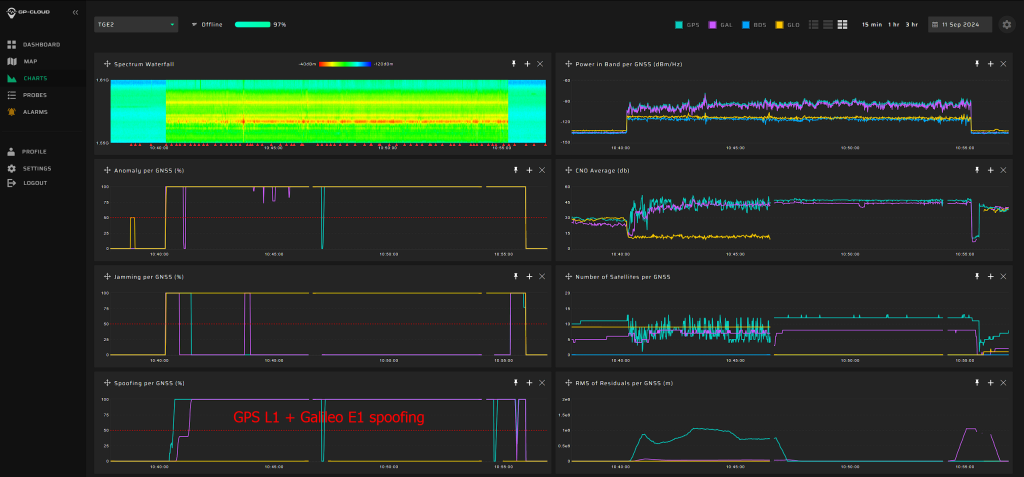
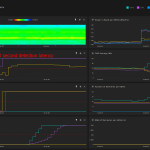
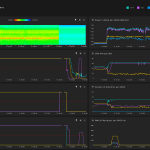
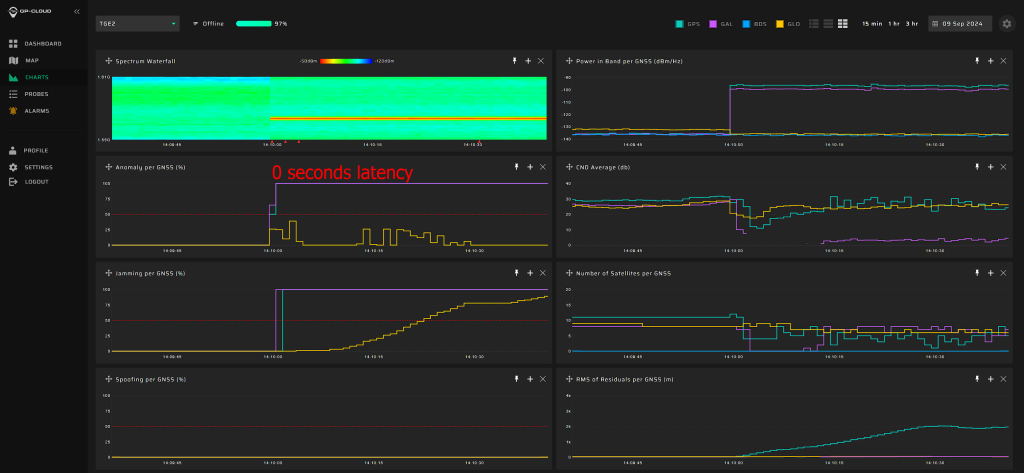
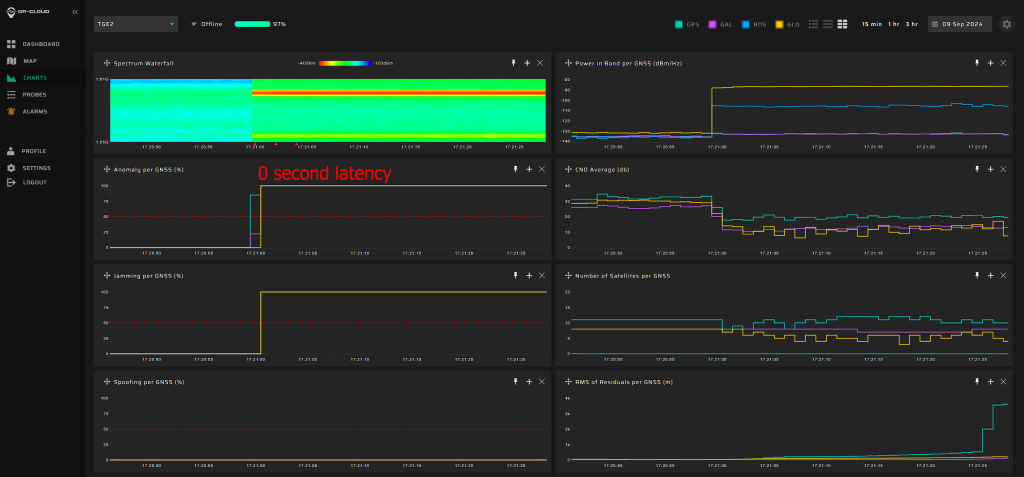
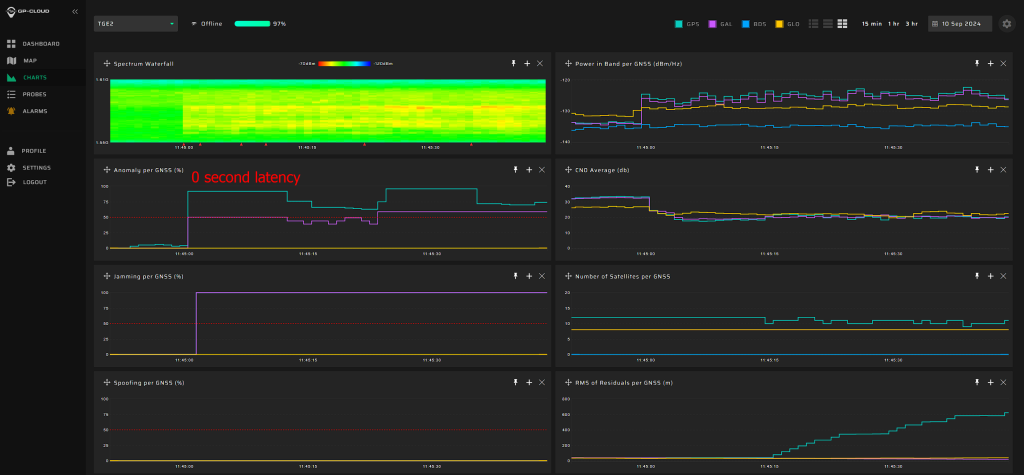
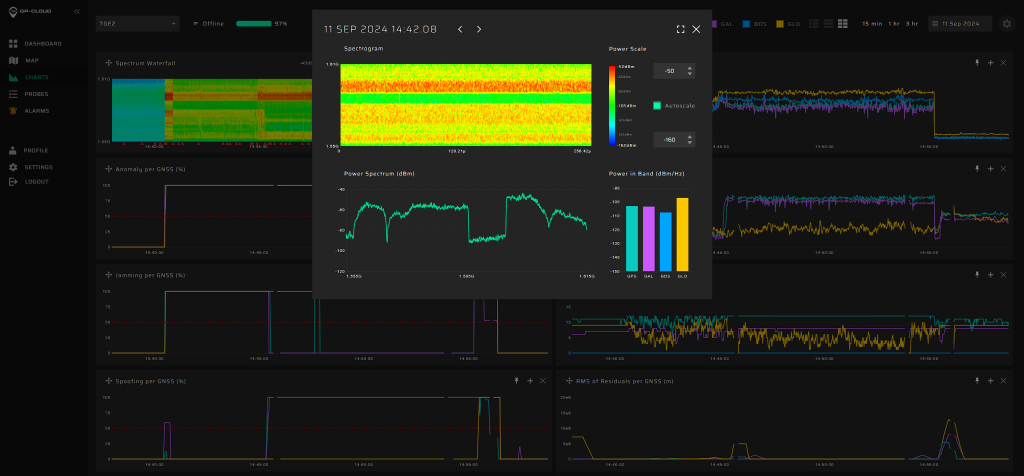
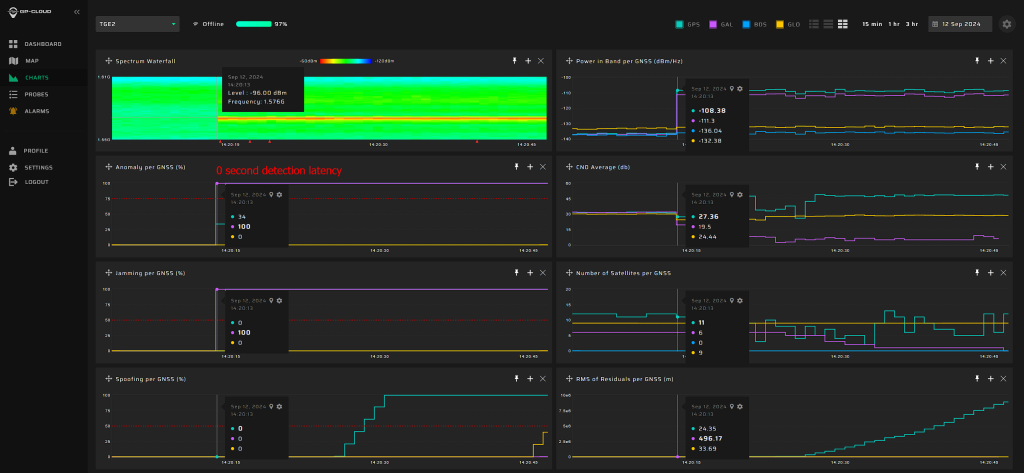
Full Event Overview

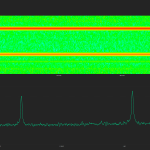
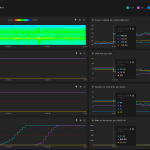
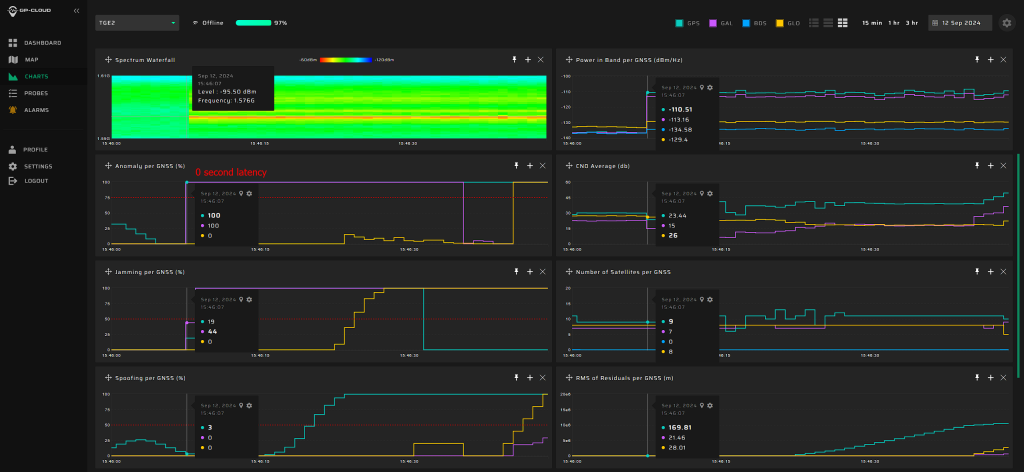
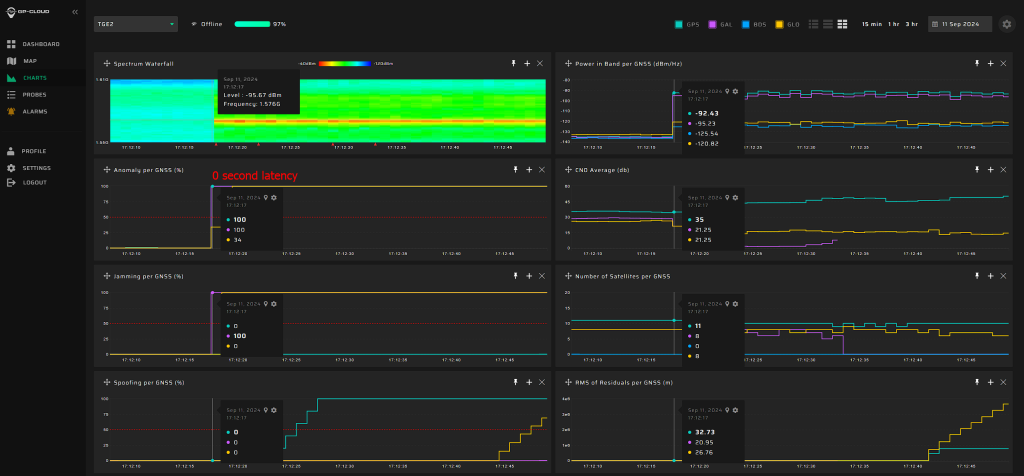
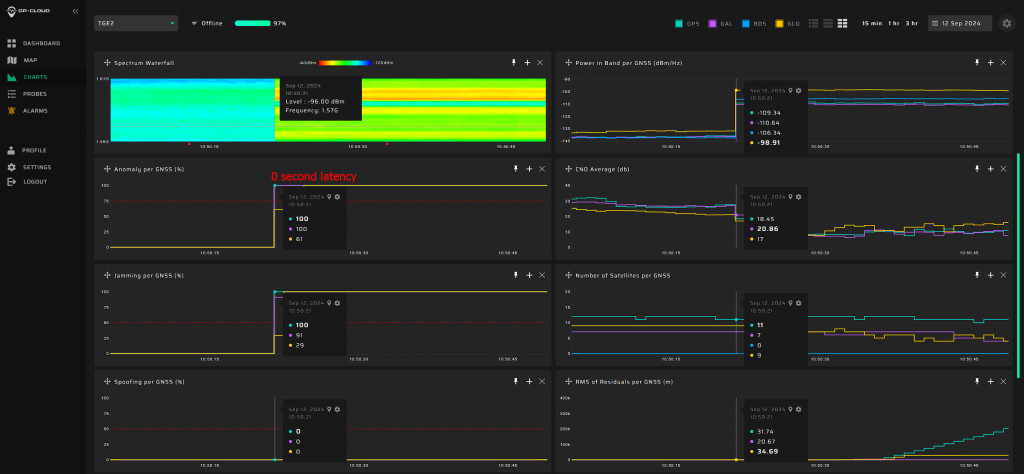
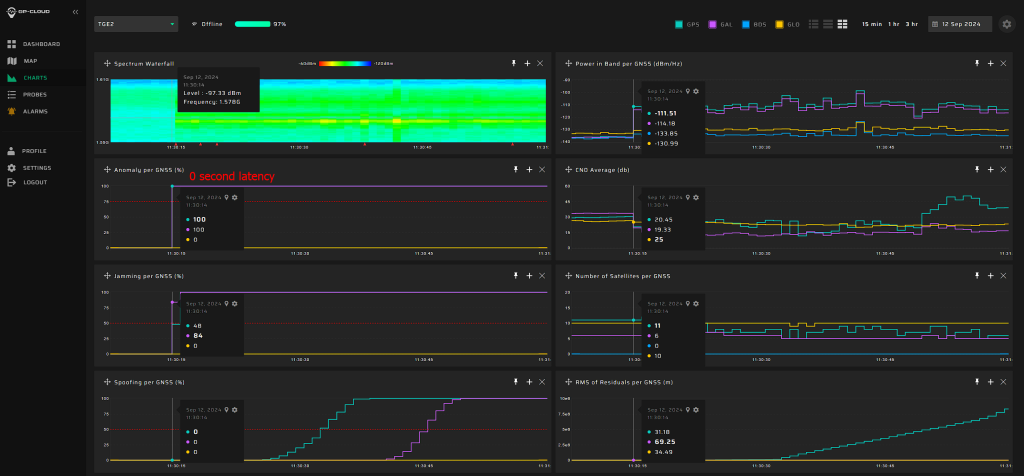
This screenshot shows the entire duration of the interference incident, providing an overview of the signal’s impact across various metrics. The key charts visible on this screenshot include:
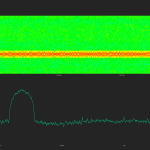
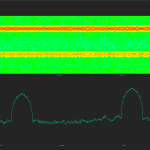
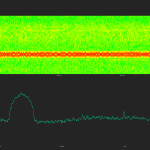
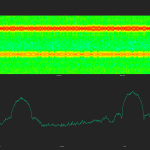
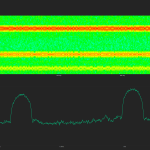
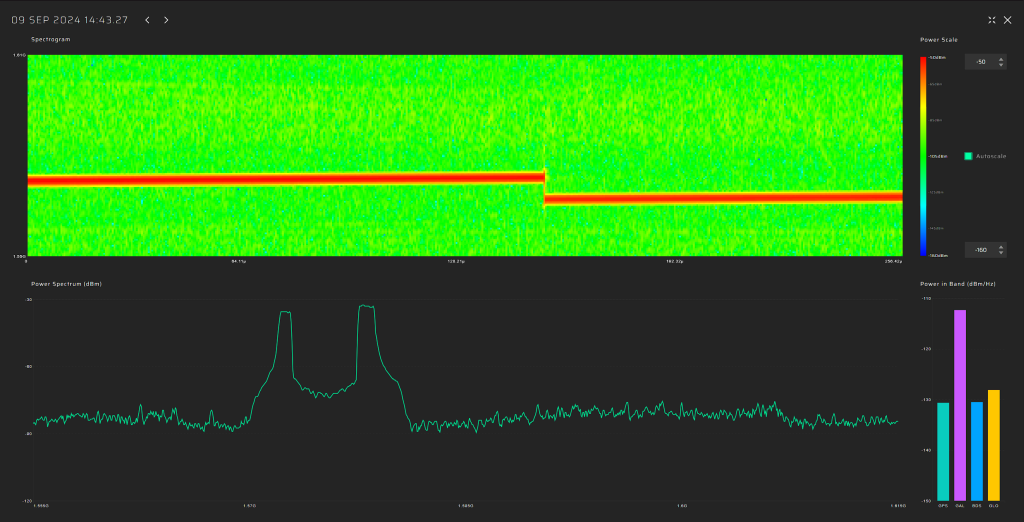
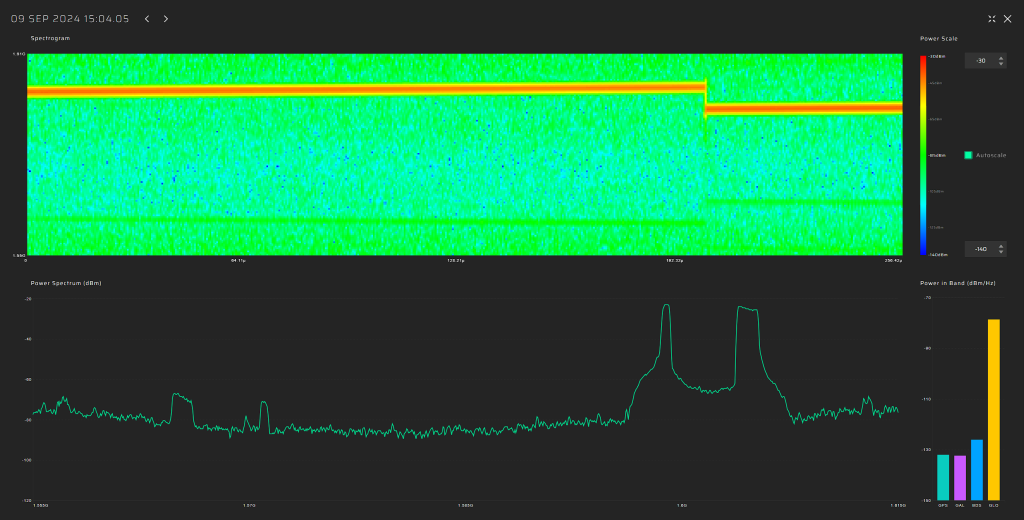
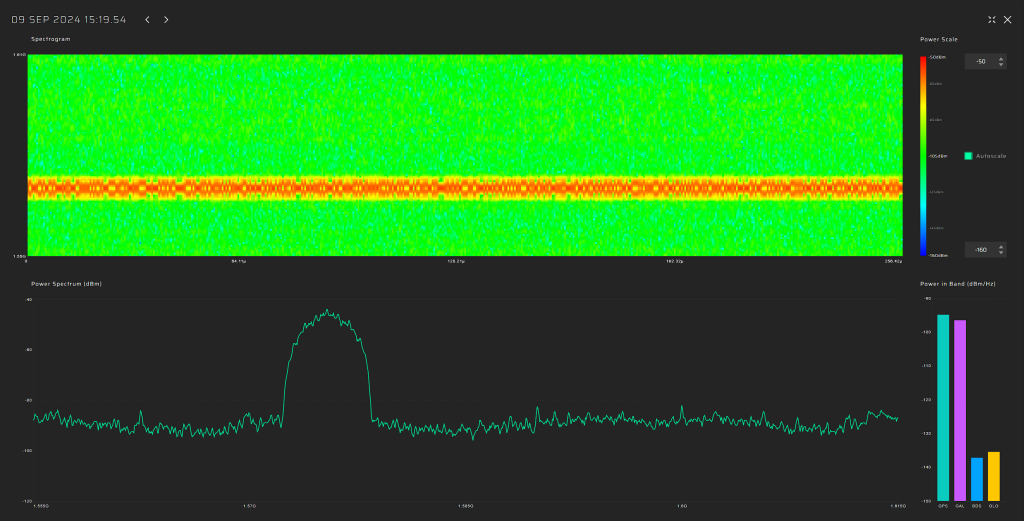
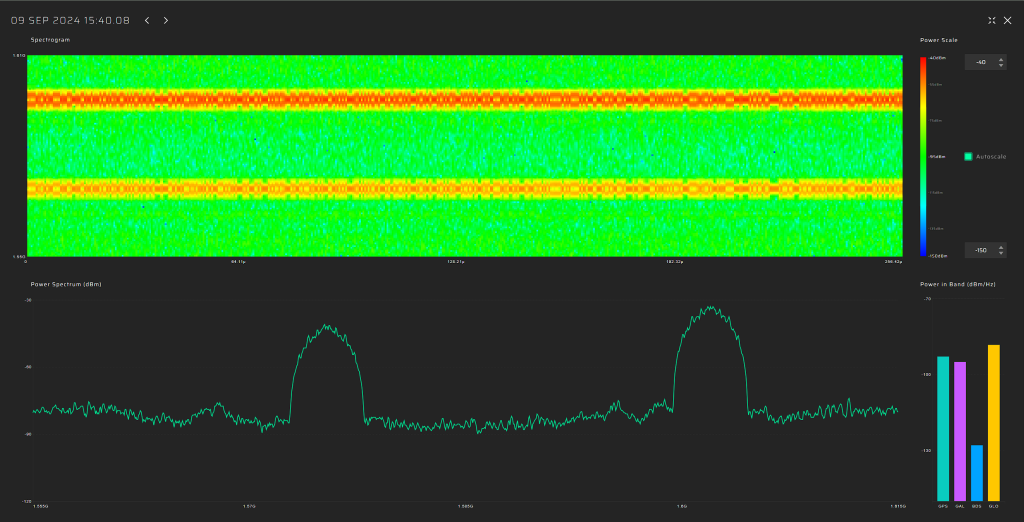
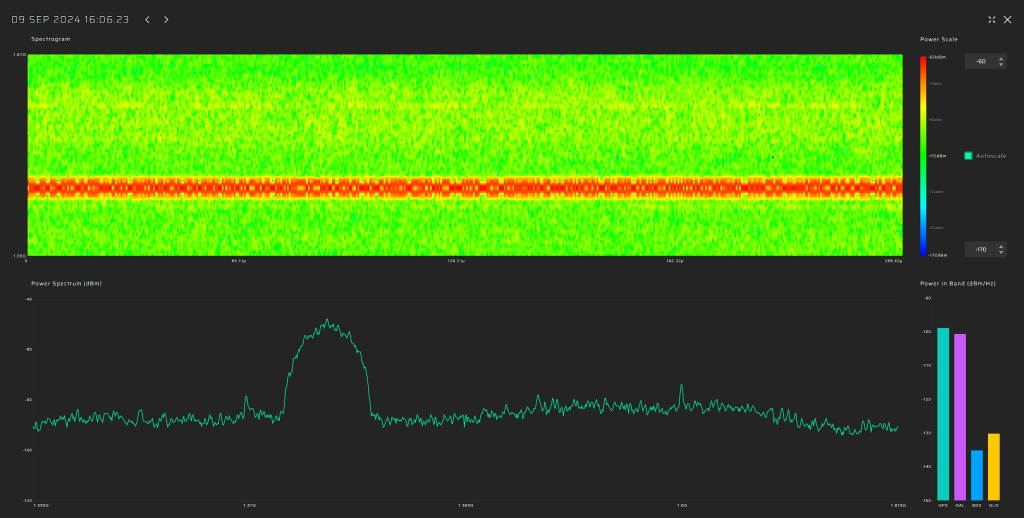
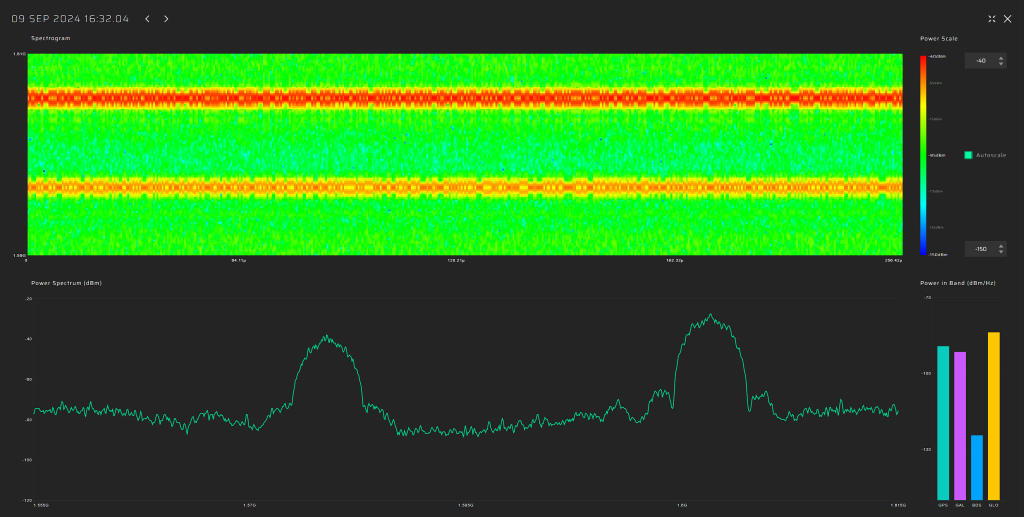
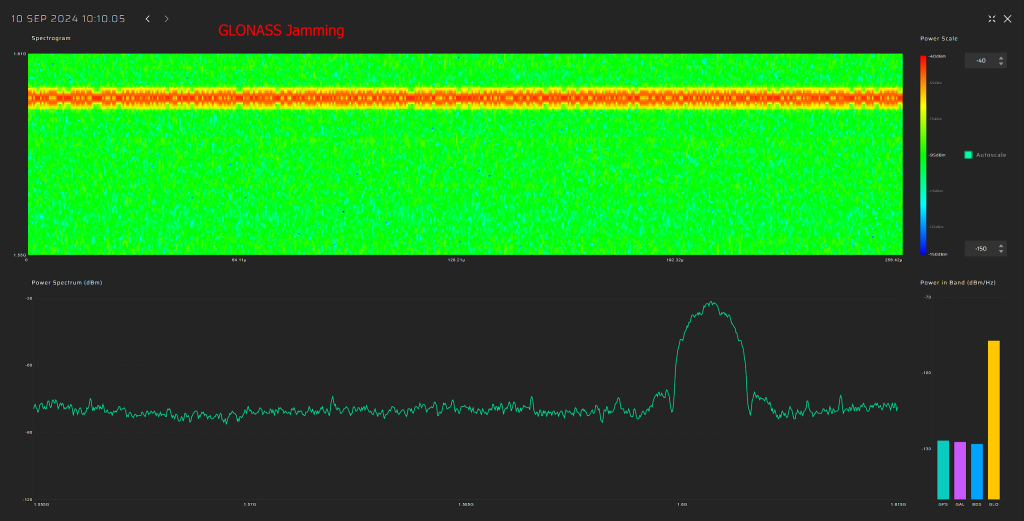
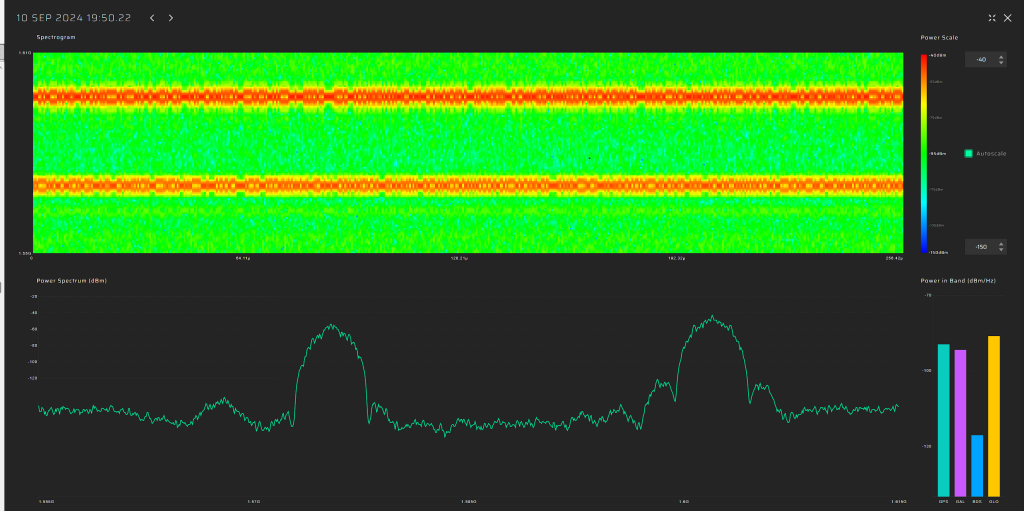
- Spectrum Waterfall:
- This chart displays the RF signal’s power spectrum over time, with frequency on the y-axis and time on the x-axis. Color intensity indicates the signal power, with brighter colors representing stronger signals. The Spectrum Waterfall is essential for identifying the exact moment the interference signal appears, serving as a reference point for measuring detection latency.
- Anomaly per GNSS (%):
- This chart shows the percentage of detected anomalies for each GNSS system (GPS, Galileo, BeiDou, GLONASS). Each GNSS system is represented by a different color line. When any of these lines cross the predefined threshold, it indicates that an anomaly has been detected, signaling a deviation from normal GNSS behavior potentially caused by interference. This chart helps determine the overall detection success of the system.
- Jamming per GNSS (%):
- This chart represents the probability of jamming interference for each GNSS system. A rise in this metric (expressed as a percentage) above the threshold suggests that the system has identified a jamming signal affecting one or more GNSS.
- Spoofing per GNSS (%):
- This chart shows the probability of spoofing interference for each GNSS system, with a separate line for each GNSS. Like the jamming chart, a rise above the threshold indicates detected spoofing activity. Since jamming and spoofing detection algorithms work independently, both spoofing and jamming probabilities may increase simultaneously. In such cases, spoofing takes priority in the final classification if it crosses the threshold.
- Power in Band per GNSS (dBm/Hz):
- This chart displays the power level in decibels per hertz (dBm/Hz) for each GNSS system across a specific frequency band. A sudden increase in power indicates the possible presence of interference.
- C/N0 Average (dB):
- Carrier-to-noise density ratio (C/N0) is an important metric for GNSS signal quality. This chart shows the average C/N0 for each GNSS system. A drop in C/N0 values typically indicates signal degradation, which can occur due to interference. Monitoring this chart helps to understand the impact of interference on signal quality.
- Number of Satellites per GNSS:
- This chart tracks the number of satellites visible and used by each GNSS system over time. A sudden drop in the number of visible satellites could be a sign of interference affecting signal reception. This metric helps determine how interference impacts satellite visibility and system integrity.
- RMS of Residuals per GNSS (m):
- This chart shows the root mean square (RMS) of residuals for each GNSS, measured in meters. It represents positioning accuracy, with higher RMS values indicating degraded position accuracy, which can occur during interference. This chart is valuable for evaluating how interference affects the accuracy of GNSS positioning.
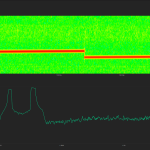
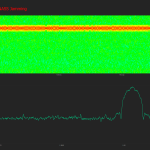
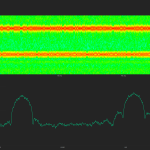
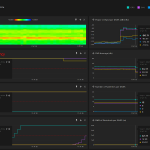
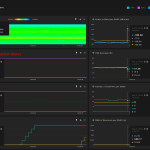
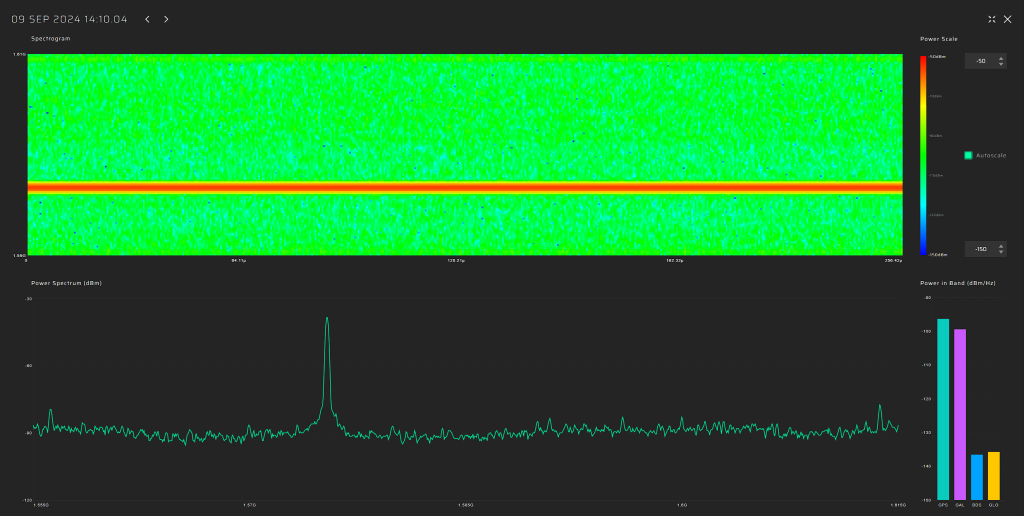
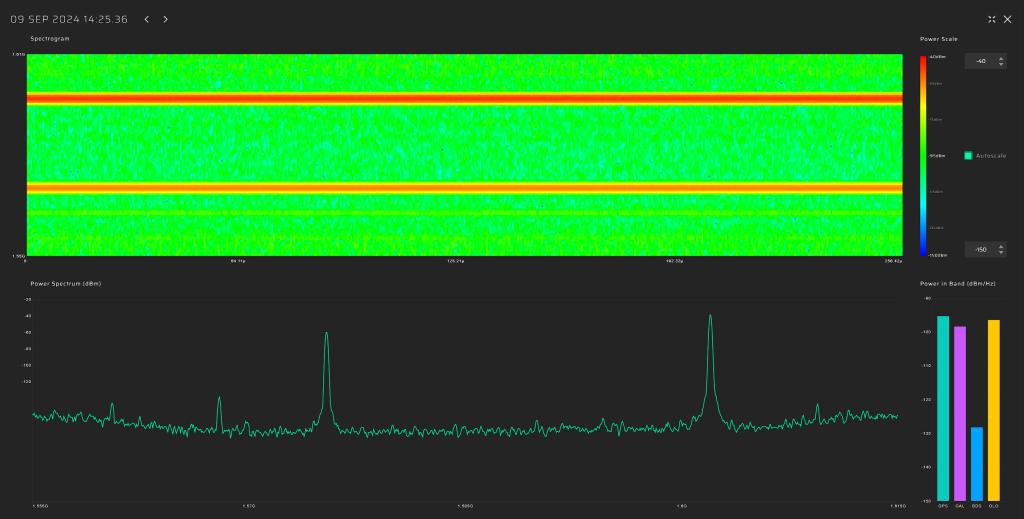
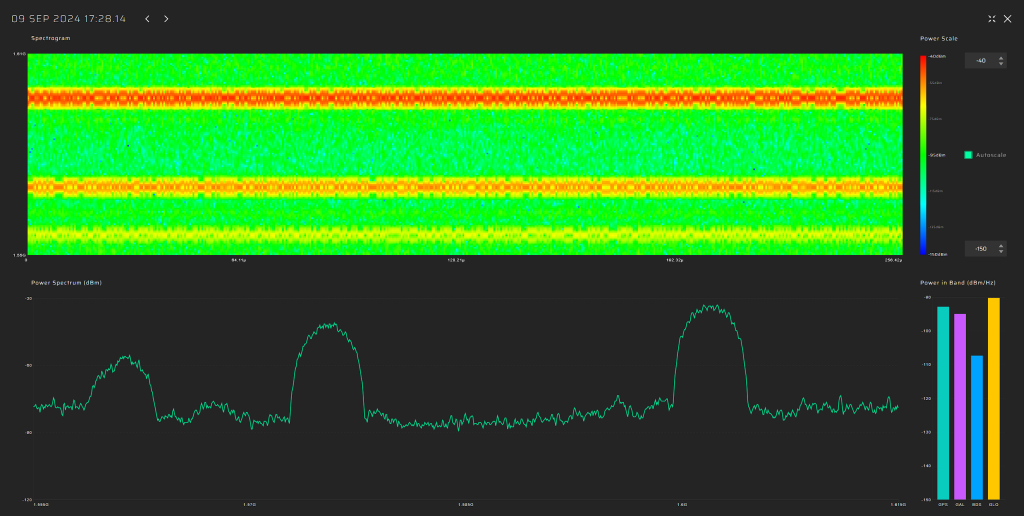
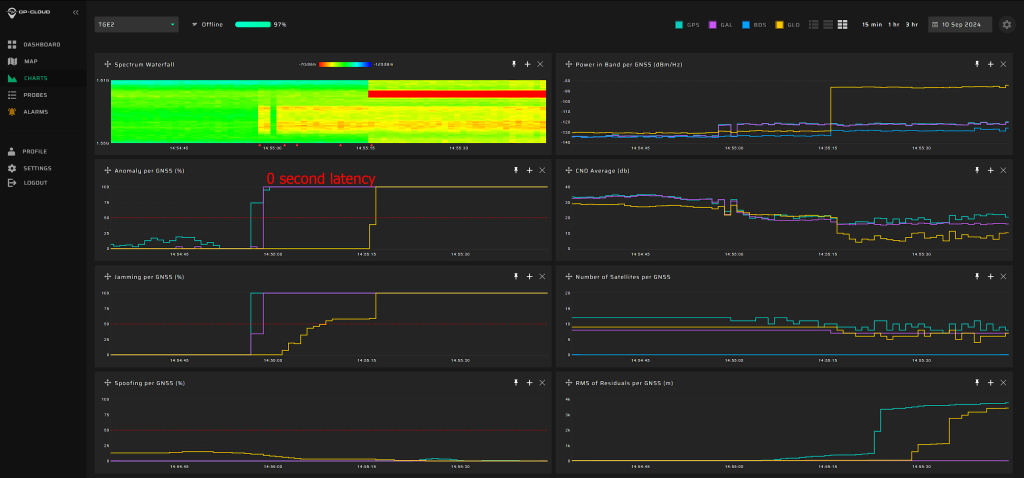
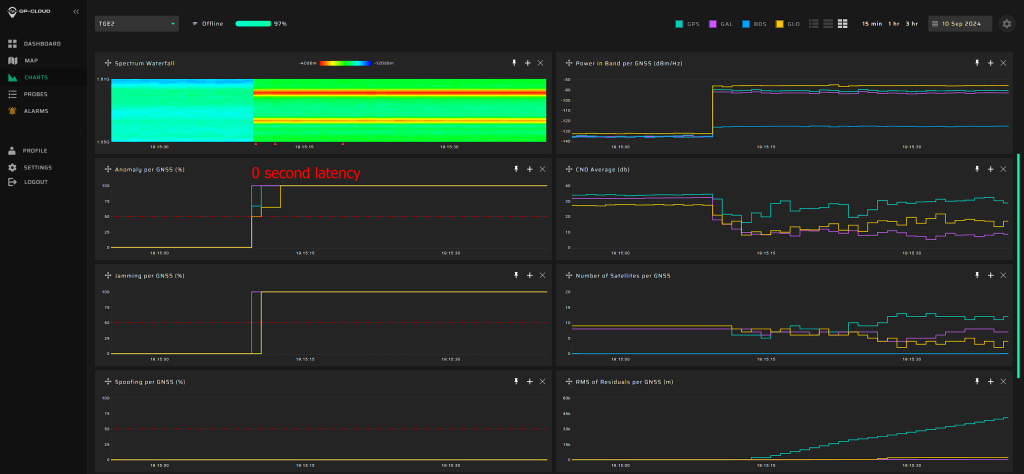
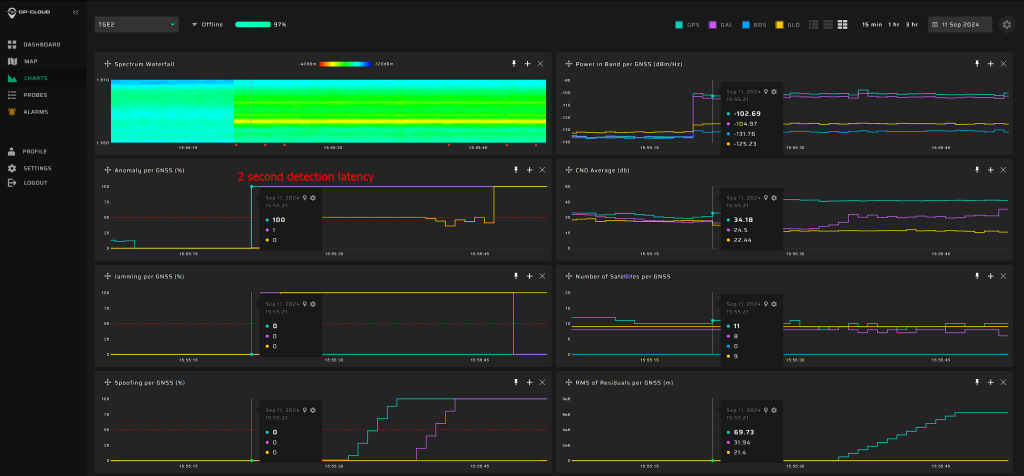
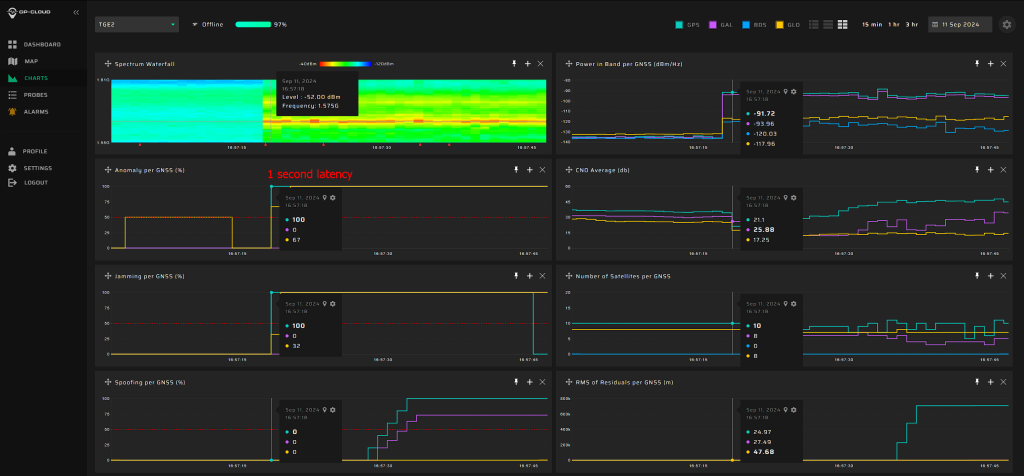
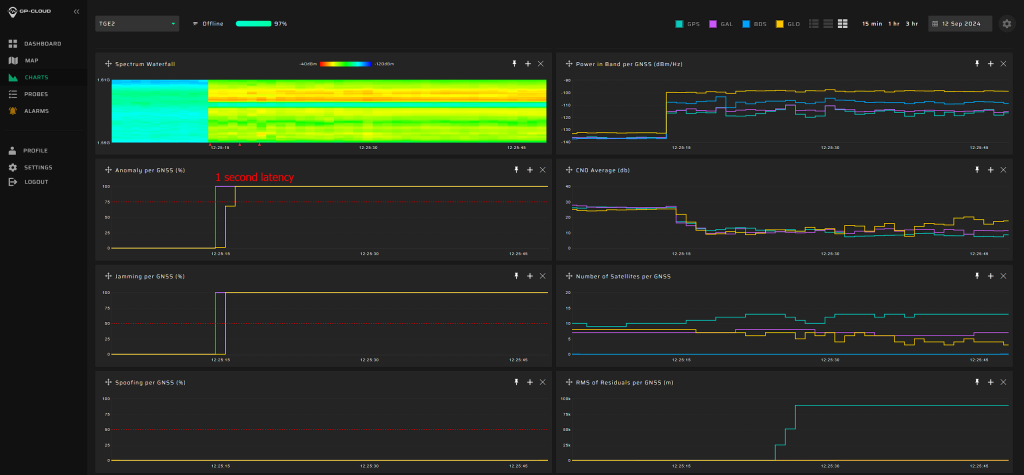
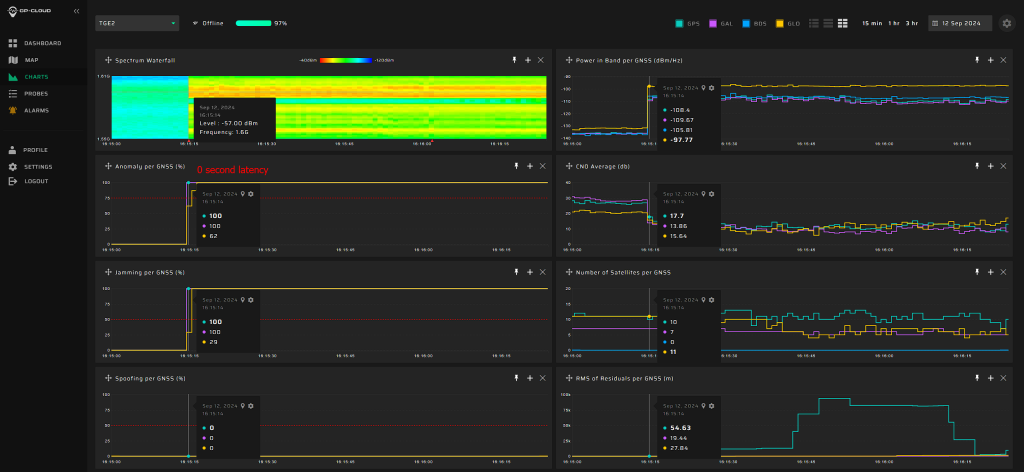
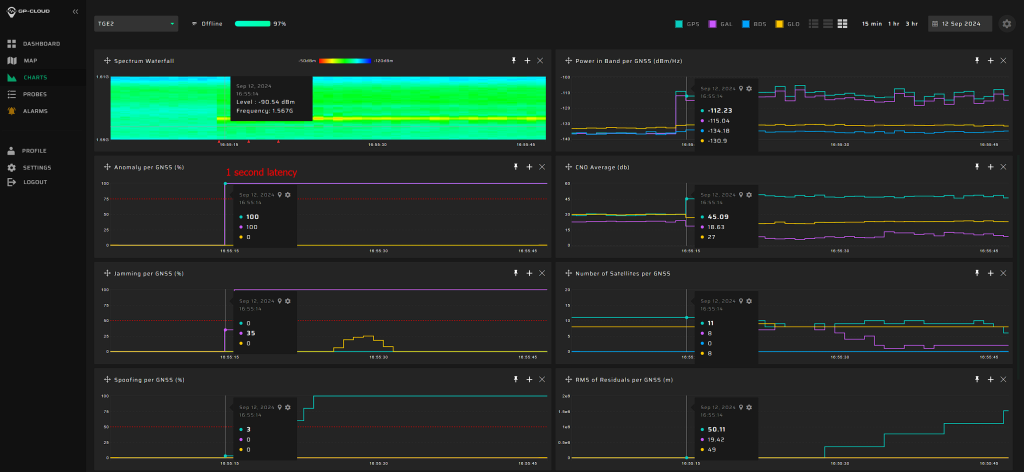
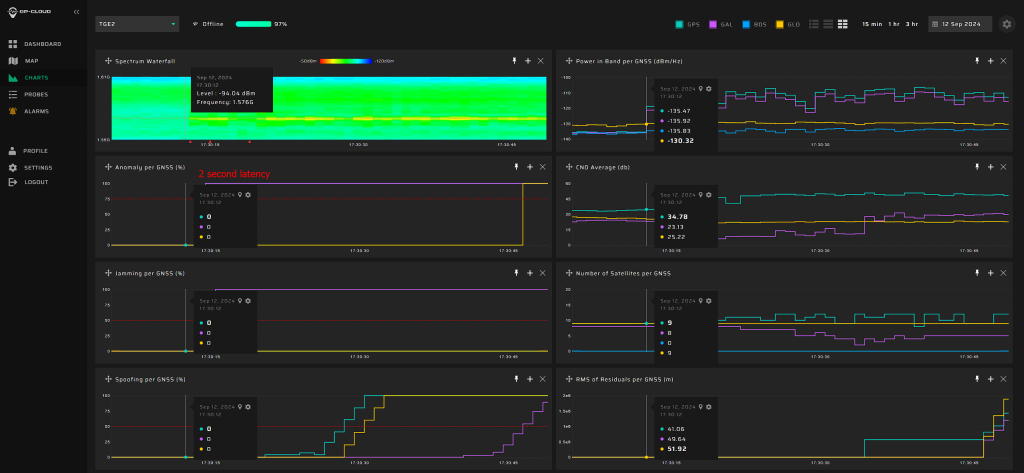
Event Front for Detection Latency Analysis
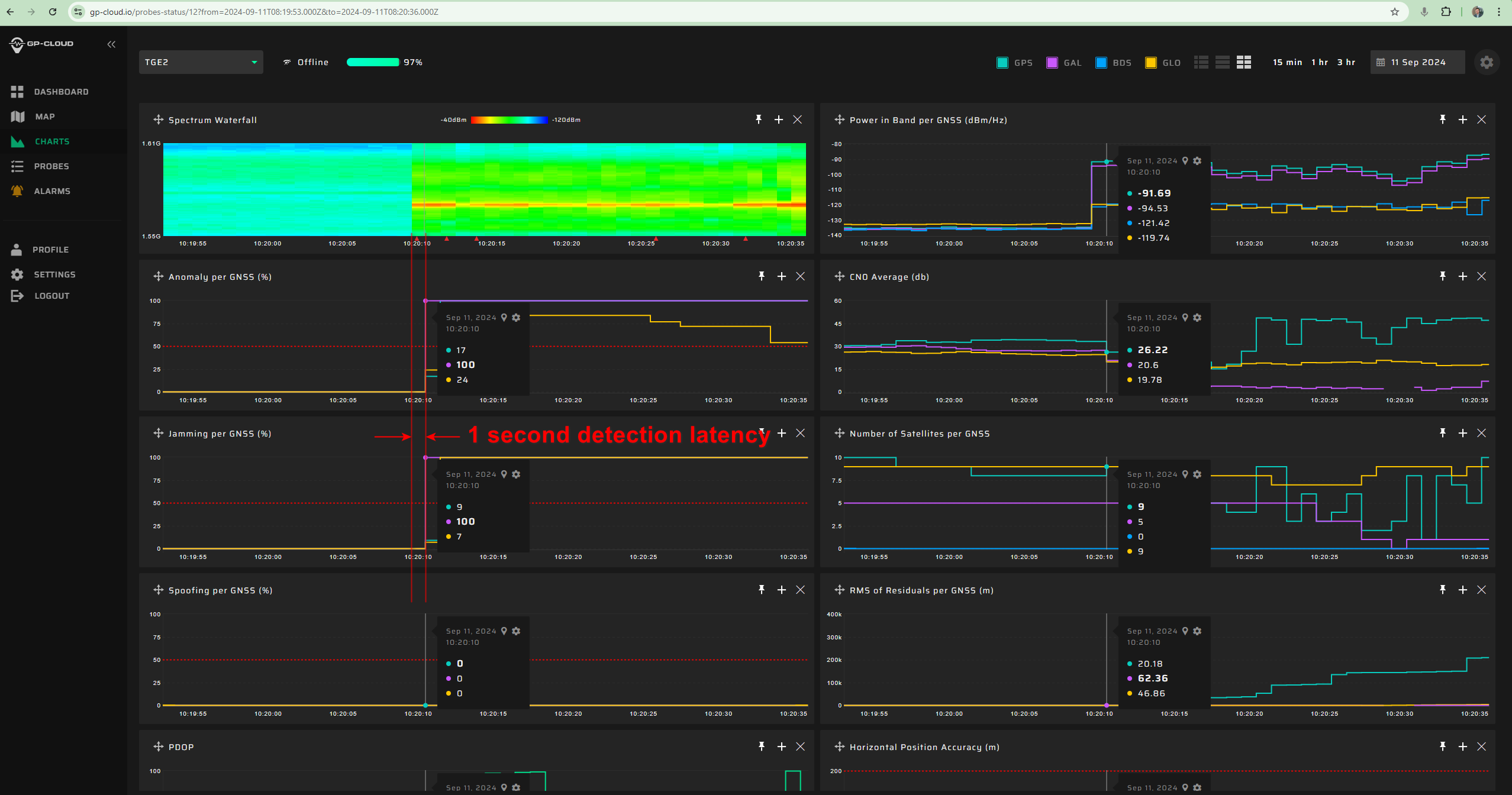
The second screenshot focuses closely on the front of the interference signal, providing a detailed look at the moment the RF signal appears and the system’s detection response. Key charts in this close-up include:
- Spectrum Waterfall: This graph demonstrates the exact moment when the interfering signal appears. This time is used as a reference for measuring the detection latency.
- Anomaly per GNSS (%): In this zoomed view, the initial rise in anomaly percentage is evident. The time difference between the RF signal appearance on the Spectrum Waterfall and the anomaly threshold crossing allows for an accurate calculation of the detection latency.
Summary of Data Interpretation for this Example
- Detection Success: Detection was successful, as evidenced by threshold exceedance on both the Anomaly, Jamming, and Spoofing charts during the event.
- Detection Latency: Approximately 1 second, calculated by the time difference between the signal’s appearance on the Spectrum Waterfall and the point where the detection threshold is crossed on the Anomaly chart.
- Classification Accuracy: The event was classified as spoofing because the values on the Spoofing graph exceeded the set threshold of 50%
Day 1. 14:00 - 18:00. Jamming
1.2.1 Jammer F8.1 ”Porcus Major”: 50 W.
CW: L1
Test Scenario: 1.2.1 according to Test Catalogue – JammerTest 2024
- Jamming
- CW: L1
- Power: 50 W

Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | 0 | ✓ – Jamming | Immediate triggering of the anomaly detection algorithm.
Correct classification |
1.2.4 Jammer F8.1 ”Porcus Major”: 50 W.
CW: L1, G1, L2, L5
Test Scenario: 1.2.4 according to Test Catalogue – JammerTest 2024
- Jamming
- CW: L1, G1, L2, L5
- Power: 50 W


Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | 1 | ✓ – Jamming |
1.3.5 Jammer F8.1 ”Porcus Major”: 50 W.
Sweep: L1
Test Scenario: 1.3.5 according to Test Catalogue – JammerTest 2024
- Jamming
- Sweep: L1
- Power: 50 W
- Sweep rate: 1 kHz
- BW: 6 MHz



Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | 2 | ✓ – Jamming |
1.3.8 Jammer F8.1 ”Porcus Major”: 50 W.
Sweep: L1, G1, L2, L5
Test Scenario: 1.3.8 according to Test Catalogue – JammerTest 2024
- Jamming
- Sweep: L1, G1, L2, L5
- Power: 50 W
- Sweep rate: 1 kHz
- BW: 6 MHz



Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | 5 | ✓ – Jamming | The non-typically long latency of signal detection is caused by unstable operation of the jammer during the first seconds of testing. The spectral waterfall shows a significant drift of the jammer frequency in the very begging. |
1.4.1 Jammer F8.1 ”Porcus Major”: 50 W
PRN: L1
Test Scenario: 1.4.1 according to Test Catalogue – JammerTest 2024
- Jamming
- PRN: L1
- Chiprate: 3 MHz
- Power: 50 W


Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | 1 | ✓ – Jamming |
1.4.4 Jammer F8.1 ”Porcus Major”: 50 W
PRN: L1, G1, L2, L5
Test Scenario: 1.4.4 according to Test Catalogue – JammerTest 2024
- Jamming
- PRN: L1, G1, L2, L5
- Chiprate: 3 MHz
- Power: 50 W

Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | 0 | ✓ – Jamming | Please pay attention to the CN0 Average and Number of Sats charts. The response of a GNSS receiver to interference with this type of waveform is very similar to the response to non-coherent spoofing. Nevertheless, our system successfully performed the classification and displayed no spoofing signatures |
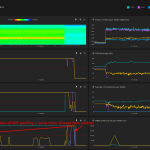
1.6.1 Power ramping with Jammer F8.1 ”Porcus Major”
PRN: L1
Test Scenario: 1.6.1 according to Test Catalogue – JammerTest 2024
- Jamming
- PRN: L1
- Power: power ramp from 0.2 µW (-37dBm) to a maximum of 50 W (47dBm) with 2
dB increments


Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | – | ☓ – Minor spoofing signatures detected | Detection latency cannot be measured as it is not clear what time to take as the reference time due to the smooth increase of the signal power.
At the very end of the jamming, the system detected false spoofing signatures, as our built-in GNSS receivers simultaneously received the signals of real satellites and the interference signal, which looks very similar to non-coherent spoofing |
1.6.4 Power ramping with Jammer F8.1 ”Porcus Major”
PRN: L1, G1, L2, L5
Test Scenario: 1.6.4 according to Test Catalogue – JammerTest 2024
- Jamming
- PRN: L1, G1, L2, L5
- Power: power ramp from 0.2 µW (-37dBm) to a maximum of 50 W (47dBm) with 2
dB increments


Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | – | ✓ – Jamming | Detection latency cannot be measured as it is not clear what time to take as the reference time due to the smooth increase of the signal power. |
1.8.1 Jammer F8.1 ”Porcus Major”: 50 W
PRN pyramid: E6, E5b, L5, G2, L2, B1I, G1, L1
Test Scenario: 1.8.1 according to Test Catalogue – JammerTest 2024
- Jamming
- PRN: E6, E5b, L5, G2, L2, B1I, G1, L1
- Power: 50 W
A jamming pyramid test of GNSS bands. The jamming is performed with PRN modulation and a constant power level. Each pyramid step will lastfor 5 minutes, with first 3 minutes active jamming, and then two minutes off. The test will jam most GNSS bands, incrementally adding bands (”pyramid steps”) to the list of jammed signals, then removing them in the reverse order.



Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | 0 | ✓ – Jamming | Since GP-Probe was configured to monitor only GPS, Galelio, GLONASS, we ignore the first interference episode in the Beidou band. The detection latency was calculated for the second interference episode when GLONASS band was effected. |
Day 2. 09:00 - 16:00. Meaconing
Meaconing is to record live navigation signals and rebroadcast them with higher power to deceive GNSS receivers to take the position of the meaconing system. The objective of these tests is to observe how equipment and systems behave under meaconing from a single receiver, with and without initital jamming.
Detecting such attacks is one of the most challenging tasks for our and any other GNSS spoofing detection system, since the repeater signals are actually the original satellite signals, but with some time delay and coordinate offset.
Detailed Test Description
GNSS retransmission of real live sky signals from one receiver, where the goal is that GNSS user equipment calculates a wrong position using real satellite data, only slightly time delayed. The test will retransmit on the L1 and L2 bands, where the employed antennas for the receivers RX1 and RX2 have cut-off frequencies at 1562 – 1588 MHz (L1) & 1216 – 1240 MHz (L2) and 1564 – 1586 MHz (L1) & 1218 – 1238 MHz (L2), respectively. This means that GPS L1 and L2, Galileo E1, and BeiDou
B1C should be visible in the retransmitted data stream, that GLONASS G1 should not be visible, and that B1I signals from some BeiDou satellites might be visible, especially on RX1. There is also a possibility that G2 signals from some GLONASS satellites might be visible. Please note that the filter’s frequency cut-offs are not perfect, so some other signals might ”leak” through. The tests are performed with constant transmission power, some with initial jamming and some without. A 10-minute break between each test is planned. The meaconed position is for RX1: (TBD1) and for RX2: (TBD2).
3.1.1 Meacon F1.1 ”Porcellus”: RX1 at 1 W
Test Scenario: 3.1.1 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Constellations: GPS, Galileo, Beidou
- Power: 1 W
- Initial jamming: No



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ☓ |
| Comments | To determine the detection latency, a plot of the jamming signature detection probability was used since these algorithms were the very first to be triggered. The classification of the interference as spoofing was done correctly even though the signal strength was very low. Detection of Galileo spoofing signatures was successful only at the very end of the test. |
3.1.2 Meacon F1.1 ”Porcellus”: RX1 at 1 W
with initial jamming
Test Scenario: 3.1.2 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Constellations: GPS, Galileo, Beidou
- Power: 1 W
- Initial jamming: 5 minutes



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | ✓ |
| Comments | The classification of the interference was performed absolutely correctly at all stages of the interference, both during preliminary jamming and following spoofing.
These scenarios are among the most challenging to classify but our system handled them perfectly. |
3.1.3 Meacon F1.1 ”Porcellus”: RX1 at 10 W
Test Scenario: 3.1.3 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: No



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ \ ☓ – Detection of Galileo spoofing signatures was not very stable. |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments | At the beginning of the interference activation, Galileo’s spoofing signatures were detected. It’s most likely a false positive detection.
Unstable detection of Galileo spoofing signatures is quite possibly caused by the poor performance of the retransmitter, as the signal to noise ratio graph shows a significant decrease for Galileo due to the retransmitted signal. CN0 should be rising, not falling. |
3.1.4 Meacon F1.1 ”Porcellus”: RX1 at 10 W
with initial jamming
Test Scenario: 3.1.4 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: 5 minutes


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | ✓ |
| Comments | Correct classification of the interference in all phases.
System spent 4 minutes to restore tracking of Galileo satellites. This is due to poor signal reception conditions. The GNSS antennas were mounted on the window sill of a building with significant limitation of sky visibility |
3.1.5 Meacon F1.1 ”Porcellus”: RX2 at 10 W
Test Scenario: 3.1.5 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: No


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ☓ |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments | According to the test plan the type of attack was supposed to be spoofing: meaconig of GPS, Galileo, and Beidou. However, our system clearly detected a powerful GLONASS jamming. Despite the powerful jamming signal in the GLONASS band, the interference classification is correct. |
3.2.3 Meacon F1.1 ”Porcellus”: RX1 and RX2 at 10 W
turned on and off at different times
Test Scenario: 3.2.3 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Scenario: complex with transmitter switching
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: No
10 W meaconing from receivers RX1 and RX2, activated at different times. RX2 is turned on 5 minutes after RX1 is activated. RX1 is turned off after another 10 minutes and RX2 is turned off after the test has lasted 20 minutes.



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments | Excellent interference classification quality despite a very complex scenario type |
3.2.4 Meacon F1.1 ”Porcellus”: RX1 and RX2 at 10 W
alternating
Test Scenario: 3.2.4 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Scenario: complex with transmitter switching
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: No
10 W meaconing from receivers RX1 and RX2, alternating continuously. RX1 is activated first, then turned off after 1 minute while RX2 is being turned on. RX2 is then turned off after 1 more minute and RX1 is turned on. The cycle is repeated for as long as the test is set up (for example 5 cycles).


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ \ ☓ |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments | Detection of Galileo spoofing signatures was not very stable |
3.2.5 Meacon F1.1 ”Porcellus”: RX1 and RX2 at 10 W
alternating with breaks
Test Scenario: 3.2.5 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Scenario: complex with transmitter switching
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: No
10 W meaconing from receivers RX1 and RX2, alternating with breaks. RX1 is activated first and left on for 1 minute, before being turned off. Nothing is then transmitted for 1 minute (transmission break). After the minute, RX2 is turned on and left on for 1 minute before being turned off. After another transmission break of 1 minute, repeat the cycle. The cycle is repeated for as long as the test is set up (for example 5 cycles).



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ☓ |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments |
3.2.6 Meacon F1.1 ”Porcellus”: RX1 and RX2 at 10 W
alternating with decreasing durations without breaks
Test Scenario: 3.2.6 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Scenario: complex with transmitter switching
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: No
10 W meaconing from receivers RX1 and RX2, alternating more and more rapidly. RX1 is activated first and left on for 4 minutes, before switching to RX2 for 4 minutes. Then, 2 minutes RX1, 2 minutes RX2, 1 minute RX1, 1 minute RX2 and continues with halving durations until approximately 16 minutes has passed.



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ \ ☓ – Detection of Galileo spoofing signatures was not stable. |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments | During the interference phases where Galileo’s CN0 signal was increasing, the system strongly displayed Galileo spoofing signatures. |
3.3.1 Meacon F1.1 ”Porcellus”: RX1
with ramping power
Test Scenario: 3.3.1 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Constellations: GPS, Galileo, Beidou
- Power: ramping power
- Initial jamming: No
Meaconing from receiver RX1, with ramping power. Power is ramped up from 0.001 W to 10 W and then back down again to 0.001 W in 5 dB steps, with each step lasting for 2 minutes.


Test Results:
| Interference Detection Success | – |
| Interference Detection Latency (s) | – |
| Spoofing/Jamming Classification Accuracy | – |
| GPS Spoofing Classification Accuracy | – |
| Galileo Spoofing Classification Accuracy | – |
| Initial Jamming Classification Accuracy | – |
| Comments | Judging by the results of our observations, the organizers failed to conduct the test. On our charts we see only 4 minutes of active interference in the range 12:58 – 13:02 Norwegian time. According to the plan, the interference was to be active in the 12:25-12:59 time range. |
3.2.7 Meacon F1.1 ”Porcellus”: RX1 and RX2 at 10 W
alternating with different switching frequencies
Test Scenario: 3.2.7 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Scenario: complex with transmitter switching
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: No
10 W meaconing from receivers RX1 and RX2. Test consists of sets of two minutes, with different switching frequencies between RX1 and RX2 for each session. Example: First session: switch after 1 minute, second session: switch every 30 seconds, third session: switch every 15 seconds, etc.



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ☓ |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments | The recovery time after spoofing was 2.5 minutes |
3.2.5 Meacon F1.1 ”Porcellus”: RX1 and RX2 at 10 W
alternating with breaks
Test Scenario: 3.2.5 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Scenario: complex with transmitter switching
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: No
10 W meaconing from receivers RX1 and RX2, alternating with breaks. RX1 is activated first and left on for 1 minute, before being turned off. Nothing is then transmitted for 1 minute (transmission break). After the minute, RX2 is turned on and left on for 1 minute before being turned off. After another transmission break of 1 minute, repeat the cycle. The cycle is repeated for as long as the test is set up (for example 5 cycles).



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments | Excellent classification accuracy |
3.2.6 Meacon F1.1 ”Porcellus”: RX1 and RX2 at 10 W
alternating with decreasing durations without breaks
and GLONASS jamming
Test Scenario: 3.2.6 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Scenario: complex with transmitter switching
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: No
10 W meaconing from receivers RX1 and RX2, alternating more and more rapidly. RX1 is activated first and left on for 4 minutes, before switching to RX2 for 4 minutes. Then, 2 minutes RX1, 2 minutes RX2, 1 minute RX1, 1 minute RX2 and continues with halving durations until approximately 16 minutes has passed.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ☓ |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments | According to the test plan, the GLONASS bands should be free of interference. However, our system detected powerful jamming in the GLONASS band. Despite the powerful jamming signal in the GLONASS band, the interference classification into spoofing\jamming is correct. |
3.2.7 Meacon F1.1 ”Porcellus”: RX1 and RX2 at 10 W
alternating with different switching frequencies
and GLONASS jamming
Test Scenario: 3.2.7 according to Test Catalogue – JammerTest 2024
- Spoofing type: Meaconing
- Scenario: complex with transmitter switching
- Constellations: GPS, Galileo, Beidou
- Power: 10 W
- Initial jamming: No
10 W meaconing from receivers RX1 and RX2. Test consists of sets of two minutes, with different switching frequencies between RX1 and RX2 for each session. Example: First session: switch after 1 minute, second session: switch every 30 seconds, third session: switch every 15 seconds, etc.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ \ ☓ – Detection of GPS spoofing signatures was not stable. |
| Galileo Spoofing Classification Accuracy | ☓ |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments | According to the test plan, the GLONASS bands should be free of interference. However, our system detected powerful jamming in the GLONASS band. Despite the powerful jamming signal in the GLONASS band, the interference classification is correct. The spoofing detection algorithms worked well for the first half of the test when the transmitter switching rate was not too high. However, the entire algorithm was correctly classified as spoofing. |
Day 2. 16:00 - 22:00. Jamming
1.18.4 -1.18.8 Jammer F8.1 ”Porcus Major”: 50 W
CW with frequency drift: 1545 to 1620 MHz
In this clause, we have combined the test results of clauses 1.18.4, 1.18.5, 1.18.6, 1.18.8 because they have the following parameters in common:
– CW signal with frequency scanning between 1545 and 1620 MHz.
– Detection latency cannot be measured as it is not clear what time to take as the reference time due to the smooth increase of the signal power.
We only validate the fact of detection and proper classification as jamming.
Test Scenario: 1.18.4, 1.18.5, 1.18.6, 1.18.8 according to Test Catalogue – JammerTest 2024
- Jamming
- CW: Frequency sweeping 1545 to 1620 MHz
- Power: 50 W
50 W frequency drift from 1545 to 1620 MHz, with a CW signal.

Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | – | ✓ – Jamming | Detection latency cannot be measured as it is not clear what time to take as the reference time due to the smooth increase of the signal power. |
1.16.4 High Power PRN jamming
Test Scenario: 1.16.4 according to Test Catalogue – JammerTest 2024
- Jamming
- PRN: L1, G1, L2, L5
- Power: 50 W


Test Results:
| Interference Detection Success | Interference Detection Latency (s) | Spoofing/Jamming Classification Accuracy | Comments |
| ✓ | 0 | ✓ – Jamming | False positive spoofing was reported after the end of the interference. But it did not affect the final classification as this event was very short |
Day 3. 9:00 - 12:00. Incoherent Position Spoofing
Simulated signals will be transmitted from a stationary antenna. Generated spoofing scenarios will use satellite ephemerides different from live sky satellites. Simulated signals may use one or more constellations and one or more signal bands. Initial positions are either False (e.g. 70 N, 10 E) or True (target location, normally close to the at transmitter antenna location). Initial time is either False (e.g. a jump in time) or True (less than 100 ns timing error for a receiver at target location). Some test scenarios may be started with jamming (lasting for 5 min, one or several test bands, before the spoofing transmission is activated). Some spoofing scenarios may be accompanied by continuous jamming (one or several test bands). Static scenarios are a fixed position, while dynamic scenarios are a drive around the area. For each dynamic test, the motion is first spoofed to a fixed start position for 5 minutes before the dynamic motion starts. There will be a break between each test to allow receivers to reacquire fix onto real satellite signals. When max and min powers are indicated, this refers to spoofing power.
2.1.1 Spoofing: Large position and time jump
with power ramp
Test Scenario: 2.1.1 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5
- No jamming.
- Simulated position: 70 N, 10 E. Simulated start time: 01.10.2024 12:00.
- Power will be ramp up from -35 dBm to 25 dBm in 5 dB steps, with each step lasting 3 minutes.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable. Initial jamming was not applied for this test |
| Comments | Detection latency cannot be measured as it is not clear what time to take as the reference time due to the smooth increase of the signal power.
Spoofing detection was triggered early enough when the signal was not yet visible on the spectrum |
2.1.3 Spoofing: Large position and time jump.
Galileo E1 only
Test Scenario: 2.1.3 according to Test Catalogue – JammerTest 2024
- Signals: Galileo E1
- No jamming.
- Simulated position: 70 N, 10 E. Simulated start time: 01.10.2024 12:00.
- Power: 0.316 W.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | Not Applicable |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | Excellent classification accuracy |
2.1.2 Spoofing: Large position and time jump.
GPS L1 only
Test Scenario: 2.1.2 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1
- No jamming.
- Simulated position: 70 N, 10 E. Simulated start time: 01.10.2024 12:00.
- Power: 0.316 W.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | Not Applicable |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | Excellent classification accuracy |
2.1.4 Spoofing: Large position and time jump.
GPS L1 + Galileo E1
Test Scenario: 2.1.4 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 + Galileo E1
- No jamming.
- Simulated position: 70 N, 10 E. Simulated start time: 01.10.2024 12:00.
- Power: 0.316 W.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | Excellent classification accuracy |
2.1.9 Spoofing: Simulated driving (route 1).
GPS L1 C/A and Galileo E1, with initial jamming
Test Scenario: 2.1.9 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 + Galileo E1
- 5 minutes of initial jamming (L1, G1, B1I, E6, L2, E5b, L5 with 2 W) prior to spoofing transmission.
- Simulated start position: Bleik community house parking lot.
- Simulated start time: 01.10.2024 12:00.
- Power: 0.316 W.


Test Results:
| Interference Detection Success | – |
| Interference Detection Latency (s) | – |
| Spoofing/Jamming Classification Accuracy | – |
| GPS Spoofing Classification Accuracy | – |
| Galileo Spoofing Classification Accuracy | – |
| Initial Jamming Classification Accuracy | – |
| Comments | The test was done incorrectly by the organizers. Spoofing was not enabled after jamming. |
2.1.10 Spoofing: Simulated driving (route 1)
with initial jamming
Test Scenario: 2.1.10 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- 5 minutes of initial jamming (L1, G1, B1I, E6, L2, E5b, L5 with 2 W) prior to spoofing transmission.
- Simulated start position: Bleik community house parking lot.
- Simulated start time: 01.10.2024 12:00.
- Power: 0.316 W.



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | ✓ |
| Comments | Excellent classification quality at all stages of spoofing |
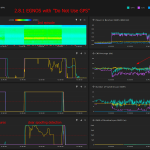
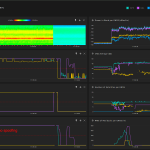
2.8.1 EGNOS with ”Do Not Use GPS” commands
Test Scenario: 2.8.1 according to Test Catalogue – JammerTest 2024
The test will only transmit EGNOS signals, that should be as close to real signals as possible, only with a different GIC information, that now tells the EGNOS broadcasted signal recipient to not use GPS.
In accordance with the test plan, two episodes of this signal were run:
- 12:30-12:40
- 12:45-13:00
According to our system, these signals behaved very differently in two episodes. In the first episode there were no signs of spoofing. In the second, there were clear signs of GPS spoofing. Since we don’t know how to interpret this, we excluded this data from the report

Day 3. 14:00 - 18:00. Сoherent Position Spoofing
Simulated signals will be transmitted from a stationary antenna. Generated spoofing scenarios will use broadcast satellite ephemeris data. Simulated signals may use one or more constellations and one or more signal bands. Initial positions are True (target location, normally close to the transmitter antenna location). Initial time is True (less than 100 ns timing error for a receiver at target location). Some test scenarios may be started with jamming (lasting for 5 min, one or several test bands, before the spoofing transmission is activated). Some spoofing scenarios may be accompanied by continuous jamming (one or several test bands). The indicated ”Test bands / constellation” refers to which signals are spoofed. Static scenarios are a fixed position, while dynamic scenarios are a simulated drive around the area. For each dynamic test, the motion is first spoofed to a fixed start position for 5 minutes before the dynamic motion starts. There will be a break between each test to allow receivers to reacquire fix onto real satellite signals.
For all tests in this group, spoofing transmission will be corrected for signal delay to simulated start
position.
2.2.3 Spoofing: Position jump
Test Scenario: 2.2.3 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: Cemetery – 69.2824699, 15.9906568, 48 m hae.
- Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
2.3.3 Spoofing: Small position jump
Test Scenario: 2.3.3 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: North end of the football field – 69.27701401, 15.96932835, 45 m hae
- Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected very minor false GLONASS spoofing signatures |
2.3.2 Spoofing: Small position jump with initial and continuous jamming
Test Scenario: 2.3.2 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- 5 minutes of initial jamming (L1, G1, B1I, E6, L2, E5b, L5 with 2 W) prior to spoofing transmission, then continuous on other bands than the ones spoofed.
- Simulated position: North end of the football field – 69.27701401, 15.969328354, 45 m hae (Height Above Ellipsoid)
- Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.





Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | ✓ |
| Comments |
2.3.8 Spoofing: Simulated driving (route 1).
Galileo only
Test Scenario: 2.3.8 according to Test Catalogue – JammerTest 2024
- Signals: Galileo E1, E5.
- No jamming.
- Simulated position: Bleik community house parking lot.
- Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | Not Applicable |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | Excellent classification quality |
2.3.5 Spoofing: Simulated driving (route 1).
GPS only
Test Scenario: 2.3.5 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5.
- No jamming.
- Simulated position: Bleik community house parking lot.
- Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | Not Applicable |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
2.3.10 Spoofing: Simulated driving (route 1).
GPS + Galileo
Test Scenario: 2.3.5 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: Bleik community house parking lot.
- Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 2 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
2.3.11 Spoofing: Simulated driving (route 1) with initial and continuous jamming
Test Scenario: 2.3.11 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- 5 minutes of initial jamming (L1, G1, B1I, E6, L2, E5b, L5 with 2 W) prior to spoofing transmission, then continuous on other bands than the ones spoofed.
- Simulated position: Bleik community house parking lot.
- Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.





Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | ✓ |
| Comments | The system detected very minor false GLONASS spoofing signatures at the end of the interference |
2.3.15 Spoofing: Flying (route 2) - ”helicopter scenario”
Test Scenario: 2.3.15 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: Over the sea 1 km N (Midnattskjæran) at 200 m hae. Spoofing transmission will be corrected for signal delay to simulated start position. Helicopter at start
position (victim position) should see coherent signals. - Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 1 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments |
2.3.12 Spoofing: Flying (route 4) - ”drone scenario”.
GPS L1 C/A
Test Scenario: 2.3.12 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A
- No jamming.
- Simulated position: 69.277014014, 15.969328354, 40 m hae. Spoofing transmission will be corrected for signal delay to simulated start position. Drones at start
position (victim position) should see coherent signals. - Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected very minor false GLONASS spoofing signatures at the end of the interference |
2.3.13 Spoofing: Flying (route 4) - ”drone scenario”
GPS L1 C/A, L2C, L5. Galileo E1, E5.
Test Scenario: 2.3.13 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: 69.277014014, 15.969328354, 40 m hae. Spoofing transmission will be corrected for signal delay to simulated start position. Drones at start
position (victim position) should see coherent signals. - Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 1 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments |
2.3.15 Spoofing: Flying (route 2) - ”helicopter scenario”
Test Scenario: 2.3.15 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: Over the sea 1 km N (Midnattskjæran) at 200 m hae. Spoofing transmission will be corrected for signal delay to simulated start position. Helicopter at start
position (victim position) should see coherent signals. - Simulated start time: Referenced to live GPS-signals.
- Power: 0.316 W.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 5 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments |
Day 4. 09:00 - 11:00. Incoherent Time Spoofing
Simulated signals will be transmitted from a stationary antenna. Generated spoofing scenarios will use satellite ephemerides different from live sky satellites. Simulated signals may use one or more constellations and one or more signal bands. Initial positions are True (target location, normally close to the transmitter antenna location). Some test scenarios may be started with jamming (lasting for 5 min, one or several test bands). Some spoofing scenarios may be accompanied by continuous jamming (one or several test bands). The indicated ”Test bands / constellation” refers to which signals are spoofed. There will be a small break between each test and a larger break after the test group is over to allow receivers to reacquire fix onto real satellite signals.
2.4.2 Spoofing: Time offset 15 minutes from real time,
with power ramp
Test Scenario: 2.4.2 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: 69.27547832, 15.96832496, 35 m hae.
- Simulated start time: offset is + 15 minutes (900 seconds), so ”into the future”.
- Power: ramp -35 dBm to +15 dBm in steps of 5 dB every two minutes.

Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | – |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | Detection latency cannot be measured as it is not clear what time to take as the reference time due to the smooth increase of the signal power.
At the beginning of the scenario, unstable spoofing detection was observed due to very weak signal power |
2.4.3 Spoofing: Time offset -3 minutes from real time,
with power ramp
Test Scenario: 2.4.3 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: 69.27547832, 15.96832496, 35 m hae.
- Simulated start time: offset is – 3 minutes (180 seconds), so ”back into the past”.
- Power: Spoofing power will start at -20 dBm and be stepped up to 15 dBm in one step after 10 minutes.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | – |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | Detection latency cannot be measured as it is not clear what time to take as the reference time due to the smooth increase of the signal power.
At the beginning of the scenario, unstable spoofing detection was observed due to very weak signal power |
2.4.12 Spoofing: Pseudorange error
Test Scenario: 2.4.12 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: 69.27547832, 15.96832496, 35 m hae.
- The pseudorange error is applied to all satellites, starting five minutes after the spoofing starts. The applied error should equal a drift of x ns/s.



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
2.4.13 Spoofing: Pseudorange error,
with initial and continuous jamming
Test Scenario: 2.4.13 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- 5 minutes of initial jamming (L1, G1, B1I, L2, E5b, L5 with 2 W) prior to spoofing transmission, then continuous on other bands than the ones spoofed.
- Simulated position: 69.27547832, 15.96832496, 35 m hae.
- The pseudorange error is applied to all satellites, starting five minutes after the spoofing starts. The applied error should equal a drift of x ns/s.


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | ✓ |
| Comments |
Day 4. 11:00 - 18:00. Coherent Time Spoofing
Simulated signals will be transmitted from a stationary antenna. Generated spoofing scenarios will use broadcast satellite ephemeris data. Simulated signals may use one or more constellations and one or more signal bands. Initial positions are True (target location, normally close to the transmitter antenna location). Initial
time is True (less than 100 ns timing error for a receiver at target location). Some test scenarios may be started with jamming (lasting for 5 min, one or several test bands). Some spoofing scenarios may be accompanied by continuous jamming (one or several test bands). The indicated ”Test bands / constellation” refers to which signals are spoofed. There will be a short break between each test and a larger break after the test group is over to allow receivers to reacquire fix onto real satellite signals.
2.5.6 Spoofing: Time offset 15 minutes from real time
Test Scenario: 2.5.6 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: 69.27547832, 15.96832496, 35 m hae.
- Time offset is + 15 minutes (900 seconds), so ”into the future”.
- Power: 0.001W


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
2.5.3 Spoofing: Time offset -3 minutes from real time,
with power jump
Test Scenario: 2.5.3 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: 69.27547832, 15.96832496, 35 m hae.
- Time offset is – 3 minutes (180 seconds), so ”back into the past”.
- Spoofing power will start at -20 dBm and be stepped up to 15 dBm in one step after 10 minutes.
- Power: 0.001W



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | – |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The interference start time cannot be determined due to the extremely low signal level which is not visible on the spectrum, therefore the detection latency cannot be estimated.In the first part of the spoofing episode when there was extreme weak signal power, the detection of Galileo’s spoofing signatures were unstable.
GP-Probe took 5 minutes to restore tracking of GLONASS satellites |
Test Scenario: 2.5.25 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- 5 minutes of initial jamming (L1, G1, B1I, L2, E5b, L5 with 2 W) prior to spoofing transmission, then continuous on other bands than the ones spoofed.
- Simulated position: Fixed spoofed position: 69.27547832, 15.96832496, 35 m hae.
- The UTC-paramter nav. data manipulation consists of the spoofing signal saying that back in 2016, there was 19 leap seconds instead of 18.
- Power: 0.001W



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 1 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | ✓ |
| Comments | An excellent classification of a very sophisticated type of spoofing. |
2.5.5 Spoofing: Time offset 15 minutes from real time.
Galileo E1
Test Scenario: 2.5.5 according to Test Catalogue – JammerTest 2024
- Signals: Galileo E1.
- No jamming.
- Simulated position: Fixed spoofed position: 69.27547832, 15.96832496, 35 m hae.
- Time offset is + 15 minutes (900 seconds), so ”into the future”.
- Power: 0.0316W



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | Not Applicable |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
2.5.4 Spoofing: Time offset 15 minutes from real time.
GPS L1
Test Scenario: 2.5.4 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A.
- No jamming.
- Simulated position: Fixed spoofed position: 69.27547832, 15.96832496, 35 m hae.
- Time offset is + 15 minutes (900 seconds), so ”into the future”.
- Power: 0.0316W


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | Not Applicable |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
2.5.6 Spoofing: Time offset 15 minutes from real time.
GPS + Galileo
Test Scenario: 2.5.6 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: Fixed spoofed position: 69.27547832, 15.96832496, 35 m hae.
- Time offset is + 15 minutes (900 seconds), so ”into the future”.
- Power: 1e-05W


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
2.5.13 Spoofing: Pseudorange error.
GPS L1 and Galileo E1
Test Scenario: 2.5.13 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A. Galileo E1.
- No jamming.
- Simulated position: Fixed spoofed position: 69.27547832, 15.96832496, 35 m hae.
- The pseudorange error is applied to all satellites, starting five minutes after the spoofing starts. The applied error should equal a drift of x ns/s.
- Power: 0.001W


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
2.5.15 Spoofing: Pseudorange error.
GPS L1 C/A, L2C, L5. Galileo E1, E5.
Test Scenario: 2.5.15 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming.
- Simulated position: Fixed spoofed position: 69.27547832, 15.96832496, 35 m hae.
- The pseudorange error is applied to all satellites, starting five minutes after the spoofing starts. The applied error should equal a drift of x ns/s.
- Power: 1e-05W

Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
2.5.16 Spoofing: Pseudorange error,
with initial and continuous jamming
Test Scenario: 2.5.16 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- 5 minutes of initial jamming (L1, G1, B1I, L2, E5b, L5 with 2 W) prior to spoofing transmission, then continuous on other bands than the ones spoofed.
- Simulated position: Fixed spoofed position: 69.27547832, 15.96832496, 35 m hae.
- The pseudorange error is applied to all satellites, starting five minutes after the spoofing starts. The applied error should equal a drift of x ns/s.
- Power: 1e-05W


Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 0 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | ✓ |
| Comments |
Test Scenario: 2.5.26 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A.
- No jamming
- Simulated position: Fixed spoofed position: 69.27547832, 15.96832496, 35 m hae.
- The UTC-paramter nav. data manipulation consists of the spoofing signal saying that back in 2016, there was counter-factual extra amount of -127 leap seconds, which in total means that there is removed -145 leap seconds.
- Power: 0.001W



Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 1 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | Not Applicable |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
Test Scenario: 2.5.27 according to Test Catalogue – JammerTest 2024
- Signals: GPS L1 C/A, L2C, L5. Galileo E1, E5.
- No jamming
- Simulated position: Fixed spoofed position: 69.27547832, 15.96832496, 35 m hae.
- The UTC-paramter nav. data manipulation consists of the spoofing signal saying that back in 2016, there was counter-factual extra amount of -127 leap seconds, which in total means that there is removed -145 leap seconds.
- Power: 0.001W


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Test Results:
| Interference Detection Success | ✓ |
| Interference Detection Latency (s) | 2 |
| Spoofing/Jamming Classification Accuracy | ✓ – Spoofing |
| GPS Spoofing Classification Accuracy | ✓ |
| Galileo Spoofing Classification Accuracy | ✓ |
| Initial Jamming Classification Accuracy | Not Applicable |
| Comments | The system detected false GLONASS spoofing signatures |
Summary and Conclusions
The following conclusions encapsulate the robust performance demonstrated by our system across all tested scenarios at JammerTest 2024. Achieving a 100% interference detection rate, our solution consistently identified and responded to both simple and complex GNSS spoofing and jamming events, establishing itself as a highly reliable safeguard for critical infrastructure.
Our system’s latency for interference detection was exceptional, with response times meeting or exceeding expectations in nearly all cases. The median detection latency of 0 seconds underscores its capability for instantaneous response, while a mean latency of 0.6 seconds further highlights its agility in real-world conditions. Additionally, the system achieved an impressive 98.3% accuracy in classifying interference types, ensuring precise identification of spoofing and jamming scenarios.
Finally, the system demonstrated remarkable resilience by restoring GNSS signal tracking swiftly after each interference event. With typical recovery times under 1.5 minutes and anticipated recovery within 45 seconds under optimal conditions, our solution surpasses the performance of many commercial receivers that struggle with signal re-acquisition after interference.
100% Interference Detection Rate
Our system achieved flawless detection across all spoofing and jamming scenarios tested, including highly sophisticated and complex interference types. This result demonstrates the system’s exceptional reliability and its capacity to safeguard critical infrastructure against any GNSS threats. With a 100% detection rate, our solution provides comprehensive protection, ensuring uninterrupted operational security and resilience in the face of diverse interference challenges.
Excellent Interference Detection Latency
The Interference Detection Latency demonstrated by the system during JammerTest 2024 was exceptional, consistently maintaining rapid response times across various jamming and spoofing scenarios. Statistical analysis of reaction times across test cases indicates that the system met or exceeded latency expectations, providing prompt detection of interference signals within 0 seconds for most scenarios.
This high-speed detection is critically important for safeguarding against spoofing attempts that aim to disrupt GNSS reliability. With low reaction latency, the system can effectively protect critical infrastructure by promptly identifying and mitigating threats, as discussed in detail in our article on GNSS spoofing detection latency.
Statistical Summary of Detection Latency:
- Median Detection Latency: 0 seconds (instantaneous for most scenarios)
- Mean Detection Latency: 0.6 seconds
- Max Detection Latency: 5 seconds (For one case only)
98.3% Spoofing and Jamming Classification Accuracy Rate
Our system demonstrated an exceptional classification accuracy rate, correctly identifying spoofing and jamming interference types in 59 out of 60 tests, resulting in a 98.3% accuracy. Only a single instance (Test 1.6.1 – Power ramping with Jammer F8.1 “Porcus Major”) resulted in a misclassification. This was due to the challenging jamming modulation combined with the presence of real GNSS signals alongside interference, creating a complex scenario.
With 60 tests performed and only one misclassification, the system’s high classification accuracy confirms its reliability for protecting critical infrastructure. This level of precision underscores its capability to consistently and accurately distinguish between spoofing and jamming, even under complex conditions.
In certain instances of GPS and Galileo experiencing incoherent spoofing, the system incorrectly flagged GLONASS for spoofing as well. This is a result of the algorithm’s intentional design. When the system cannot verify the authenticity of signals from any one constellation and simultaneously detects spoofing on others, it will indicate a spoofing alert across the board. This is a safety measure to ensure the protection of critical infrastructure, even if it means accepting some false positives.
GNSS Signal Tracking Recovery After Spoofing
Our system successfully restored tracking of original GNSS satellites after each spoofing episode. In the majority of cases, recovery times were within 1.5 minutes, although in some challenging scenarios, recovery extended up to 5 minutes.
This result is outstanding, especially considering that many commercial GNSS receivers struggle—or even fail entirely—to reestablish tracking after such interference.
We dedicated significant resources to achieve this high level of resilience. It is also important to note that, during this testing, our antennas were mounted on a windowsill, with a restricted view of the sky. This limited satellite visibility contributed to longer recovery times. Under more favorable conditions, we anticipate recovery times to fall within 45 seconds, further enhancing system performance and reliability.

{kind=link}
{kind=link}